On March 1-3, 2016, CIDAUT attended to Barcelona Plenary Meeting in order to discuss the progress and next steps of the SafetyCube project.

Within SafetyCube’s methodology workpackage, guidelines for literature search and for summarizing research results – including meta-analysis – have been developed, which together with the revised template for coding research studies, ensures a uniform way of addressing different risks and measures in different areas of interest. That way it will be possible to perform overall quantitative analyses over studies that are otherwise hardly comparable. First results are planned to become available late autumn 2016.
Moreover, vehicle, infrastructure and behaviour workpackages discussed the specific issues and particularities involved in each field.
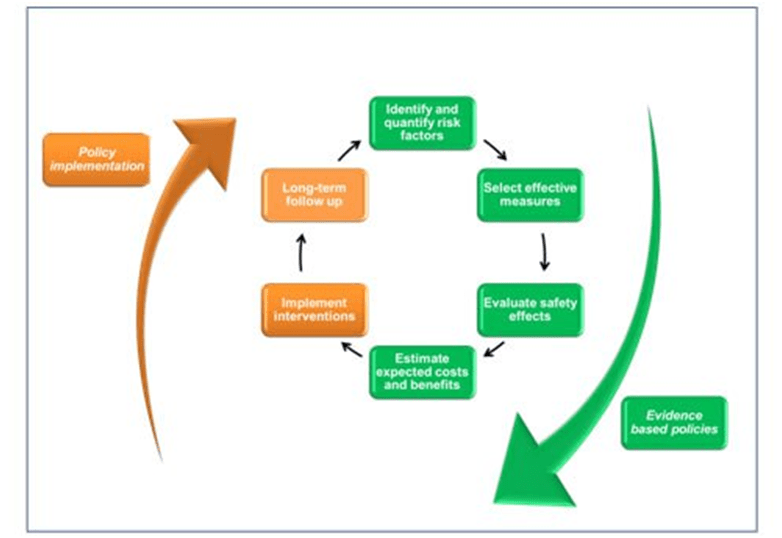
A major part of the discussions was dedicated on the design and the functionalities of the SafetyCube Decision Support System (DSS), on the basis of the feedback from stakeholders received so far during the various SafetyCube workshops, as well as on the so far experiences from the analyses carried out within SafetyCube.
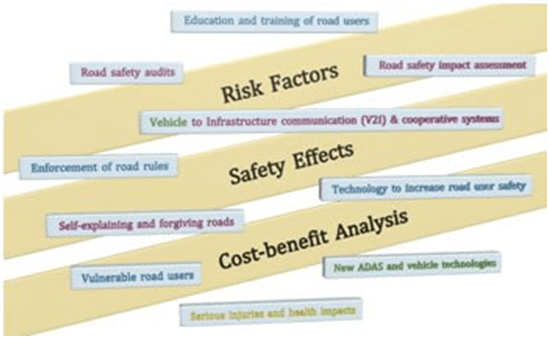
SafetyCube is a 3-year Horizon 2020-project centred on state of the art evaluations of accident risk factors and safety measures based on accident data analysis and on in-depth understanding of causes of road accidents. It aims at developing a Decision Support System and guide road safety stakeholders to identify the most cost-effective measures that will address the most pressing road safety problems on the European level. Analytic methods will be developed, and key road safety themes will be used to develop and demonstrate the project’s integrated approach. The project is led by Loughborough University, UK.
