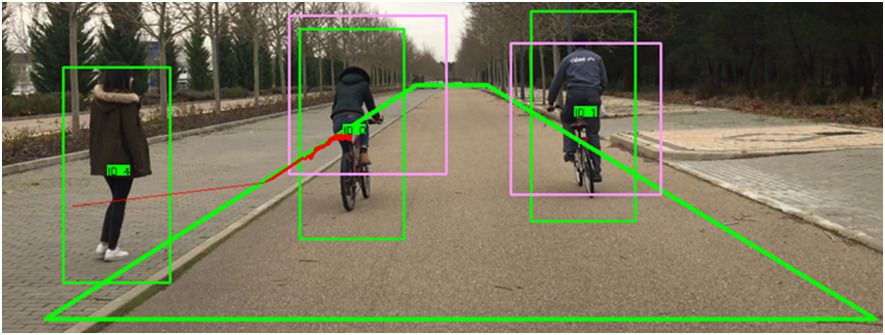
In the field of the CERO Project, Cidaut has performed real time on board tests for vulnerable road users’ protection and short range communication. In the case of vulnerable users’ protection the tests have consisted in detecting both pedestrians and cyclist in different traffic scenarios, like overtaking, crossing or appearing behind big vehicles front blind points. The solution obtained is based in low cost components and simplified software. In fact, the system consists of a monocular webcam with a single processor to evaluate the images registered by the camera. The big effort has been made in the optimisation of the system program and in the use of artificial intelligence to teach the system.
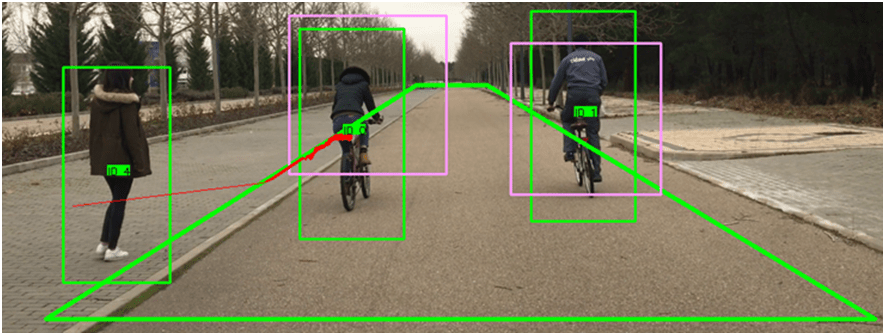
All the scenarios tested were successfully completed, the different vulnerable road users were detected in advance and attending to their relative position with the vehicle trajectory the driver was advised accordingly. An important output of these trials has been the time needed for the system to register the image, process it and decide if it is a vulnerable road user or not. This time is 0,11 seconds clearly lower than the average reaction time of a human, 1 second, or the reaction time of a driver in alert situation, 0,5 seconds, and with the additional advantage of no distractions or drowsiness.
In parallel, the dedicated short range communication system developed in the project has been tested in different scenarios, the most relevant ones have been: semaphore communication, work zone + traffic jam and personalised messages for different users. In the first case communication between vehicle and traffic light, when the vehicle is approaching the traffic light, it communicates to the traffic light its speed and position, according to the time to red or to green, the traffic light makes a recommendation to the vehicle about how to proceed, immediately, the message appears in the HMI developed for the project. In the second case, the vehicle is alerted 500m in advance about the cut of one of the lanes of the road due to road works, and in the case of traffic jam due to the work zone, the vehicle is informed by the rest of the vehicles about this situation, as in the previous case, the corresponding graphic messages appear in the HMI of the vehicle. The personalised messages is aimed to substitute the large and costly (about 40 thousand euro) variable message signals in the roads. In this case the infrastructure has several pieces of information available for the users, but the users will only receive the information useful for them. For the test two vehicles were running on the track, the first one was an electric vehicle, and the second one a dangerous goods vehicle. The first vehicle received information about how to reach the closest charging station, while the second one was informed about a mandatory deviation for dangerous goods transport. The short range communication demonstrated to have more than 800 meters range and at the same time to be the best ally of the large range communication to warranty a seamless connectivity for the future autonomous vehicle.