Automated driving is currently one of the major research topics in the automotive field, mainly motivated by the improvement of the safety [[1]]. It is supposed that automated driving will eliminate human error thank to the use of technology; however, as long as the automated vehicles continue to have to share the road with conventional cars, accidents will continue to occur. Against this background, CIDAUT together with i2CAT and CTAG have carried out a simulation model chain aimed at determining the occupant injuries after a side collision in an automated vehicle and in a complex urban environment at different speeds. To do this, it was necessary to digitally simulate both the environment where the accident takes place and the vehicle’s communications (i2CAT), as well as the autonomous car itself (CTAG). For its part, CIDAUT was responsible for determining the damage to the occupant caused by the accident.
The fact that the simulation tool focus on side collisions is principally due to the accidentology study carried out as part of the European OSCCAR project, in which CIDAUT participated. Specifically, it concluded that considering mixed traffic conditions, side impacts will continue to be common in autonomous vehicles (it is estimated that around 20% of the total).
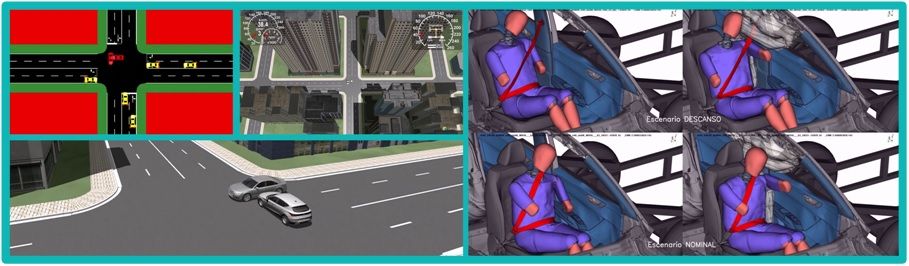
Under that premise, the developed tool chain is able to simulate the consequences of a side impact over the occupant at different positions, and taking into account the communications with other vehicles or infrastructure. Briefly, the fact of being able to simulate V2X Communications allows us to know when the vehicle is informed about the risk of collision. In this way, we can adjust the parameters of the restraint system more realistically, taking into account that this information will allow us to deploy the airbags earlier.
This work is part of @INTEGRA project, an initiative that pursue projects and activities that respond to the major challenges of a new, safer, smarter, more sustainable, connected and automated mobility. The project, which is funded by CDTI through Ministerio de Ciencia e Innovación in the frame of the funding for Excellence in Research Centres “Cervera”, involves the three research centres mentioned above: CTAG, CIDAUT and i2CAT, in addition to ITENE.
[1] Watzening D., Horn M. (2016) Automated driving: safer and more efficient future driving, Springer Interntional Pubishing. ISBN: 978-3-319-31893-6.